ROS SLAM Navigation
SLAM with ROS2
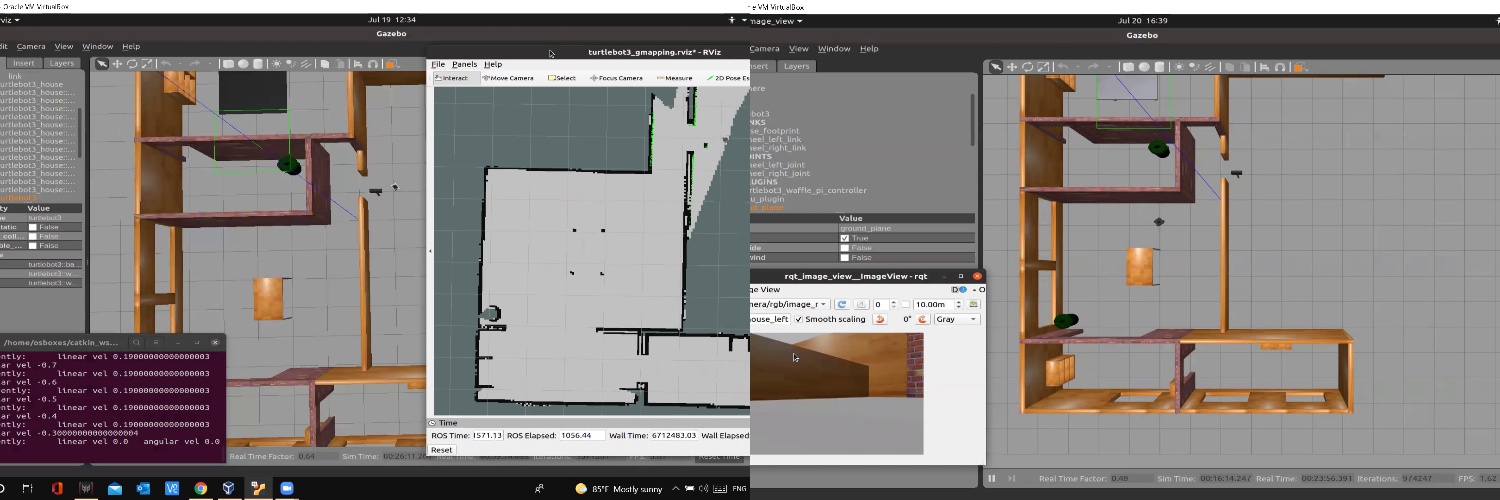
This project was a result of my journey into learning ROS — one of the most powerful robotics frameworks and absolutely not beginner-friendly. I made use of the TurtleBot3 package for mapping a virtual world and making the bot move to any point within the environment dynamically on its own, while also controlling the robot manually via teleop for easier navigation work.
Project Info
- Category Application
- Client NA
- Date 1st July, 2021
- Project URL View Link